VR远程控制多用途机器人(危险作业、社交、元宇宙)
来源: 发布时间:2023-12-04
浏览次数:9271
基本信息
第一作者姓名:毕雯皓
性别:男
民族:汉族
第一作者学校:北京市东直门中学
第一作者人所在年级:高二
第二作者姓名:
性别:
民族:
第二作者人所在学校:
第二作者人所在年级:
第三作者姓名:
性别:
民族:
第三作者人所在学校:
第三作者人所在年级:
辅导教师姓名:孔祥坤
作品摘要
*结构组成:
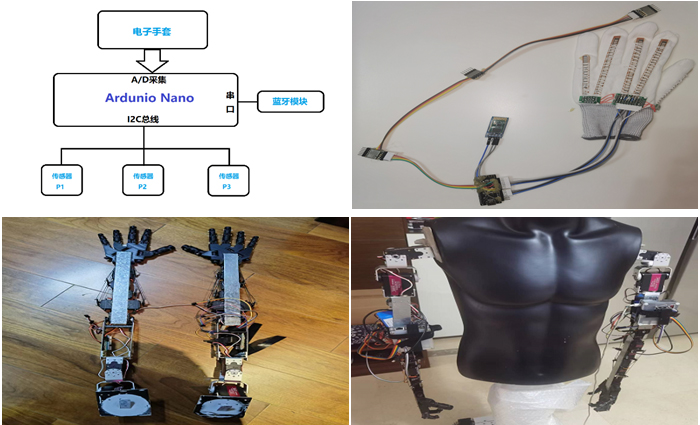
本作品包括功能模块:远程控制(通过互联网远程传递操作者的手臂及手指运动状态)、VR互动(机器人配备双目摄像头,可以通过网络图传给远程操作者);硬件模块:远程控制端(选用MEMS陀螺仪加速度传感器来检测手臂姿态,采用电阻弯曲度传感器自制电子手套,准确检测出手指弯曲及伸直动作);机器人端(手指及手掌采用3D打印制作,手臂采用铝板金属安装)。
*主要特征:
通过单片机+MEMS陀螺仪加速度计传感器实现人体上肢及运动状态体感识,通过WIFI或蓝牙远程传输手臂状态。机器人主控采用树莓派控制,接受远程传来的手臂及手指状态,进而控制机器人上臂及手指完成相同动作。VR摄像头用于实时传输机器人的周边场景,远程图传给VR显示设备,操作者根据VR显示可以完成远程控制。
*主要用途:
本款机器人是可以通过VR(虚拟现实)远程控制的一款多用途机器人,同时配备不同的行走模块可以实现:远程拆弹等危险作业;虚拟现实远程交友;也可以线下充当元宇宙游戏中的游戏人物,更好地身历其境地体验游戏。
*创新点:
本研究采用MEMS陀螺仪加速度计传感器检测人体姿态;同时将机器人应用到线下,实现元宇宙游戏、交友等真实互动体验;而且可以将VR机器人应用到远程危险作业。
作品说明
*问题提出:
*提出的问题和解决的问题:
我在玩VR(虚拟现实)游戏时通常会被眼前的场景所震撼,不由得让我想去抓取这种场景或场景中的人物。当然这一切都是虚幻,是根本摸不到的。为此我在想是否能做一个机器人来充当这些场景中的特定人物?后来我进一步拓展思路,我如果能做一个多用途的机器人,这个机器人通过不同的组合,可以完成多种远程任务或者充当VR中的特定人物,那么应该会有很广阔的应用前景!
研究问题的原因和意义:
在现代社会的一些重要的场景中,比如营救、危险作业、VR体验和元宇宙游戏等方面,可远程控制的机器人成为我们解决这些难题的重要手段。如何远程控制机器人精确的定位并按照操纵者的指令完成精细的工作,是现阶段研究的重点,本研究尝试通过3D打印、编程、系统控制等多种手段,开发了一个可远程控制的机器人,能够精准接受信号,并完成制定动作,此项研究为后续远程控制的应用与优化奠定基础。
*解决方案:
解决问题的办法:
本研究主要难点是仿生手指的机械设计与计算机控制。
项目初期:先验证了采用MEMS加速度计识别人体手臂状态,进而远程控制简易模拟的机械臂的可行性。
项目中期:主要花费在仿手指的3D设计上,设计好之后用3D打印机打印出成品,配合树莓派控制器,完成手指灵活运动。
项目后期:组装调试、联调完善、加装VR控制等。
发明研究的重点:
1.远程控制端设计,即识别操作人员的手臂及手指运动状态,通过互联网远程传递给机器人,完成相应的跟随运动动作。
2.机器人设计,包括大臂的设计、小臂的设计、仿生手指的设计与整体组装。
发明研究的难点:
用于识别操作人员的手臂及手指运动状态,通过互联网远程传递给机器人,完成相应的跟随运动动作。这个是本项目的一个难点,跟据调研目前市面上有以下几种方法来检测:
(1) 双目视觉识别
(2) 电子皮肤
(3) MEMS陀螺仪角度传感器
发明研究的难点:
用于识别操作人员的手臂及手指运动状态,通过互联网远程传递给机器人,完成相应的跟随运动动作。这个是本项目的一个难点,跟据调研目前市面上有以下几种方法来检测:
(1) 双目视觉识别
(2) 电子皮肤
(3) MEMS陀螺仪角度传感器
本发明使用方法、附图说明性文字:
机器人端采用双目摄像头,可以通过图传方式将现场立体影像传递个人体遥控端的VR BOX,操作者可以在VR BOX内看到远程机器人短立体影像。进而控制机械臂和机械车完成相应的动作。方案通过不断改进与微调,最终实现了与之前预想相对接近的功能。可以灵活实现手臂遥控,可以实现手指灵巧抓取物体,并且可以通过VR远程精确挪动小车到确定位置,通过机械手完成相应的操作。
*使用或试用效果:
基本可以实现远程控制机器人手臂运动、手指抓取物体以及机器人移动等。
*优点:
采用MEMS陀螺仪加速度计传感器检测人体姿态。首次提出将机器人应用到元宇宙线下操作的概念,将之前的虚拟变成了“现实”。同时也可以用于交友互动等类真实体验,比如实现远程朋友的机器人代理握手、拥抱等互动,将VR机器人应用到远程危险作业。
*还需进一步研究的问题:
人体姿态检测精度还需要进一步提高; 仿生手指做的比较真实,但是手臂还有所欠缺,目前看上去还不太协调,距离真实手臂还有差距。后续版本需要利用3D CAD软件重新设计。后续版本要增加下肢设计,可以实现双腿与小型履带车等不同行走模块灵活更换。
作品图片
查新说明
*查新网址与关键词:
关键词1:VRand远程操控and机器人,结果找到59条相关专利;
关键词2:远程操控and机器人and危险作业,结果找到2条相关专利:
关键词3:远程操控and机器人and虚拟游戏,结果找到2条相关专利。
*与本发明最相近的发明专利、研究文献的名称与摘要:
CN202211021626.1基于VR技术的机器人远程控制方法、装置以及系统
摘要: 本发明公开了一种基于VR技术的机器人远程控制方法、装置以及系统。该发明包括:VR系统客户端显示机器人在工厂作业的VR场景,其中,VR场景是依据机器人的多个运行参数以及工厂对应的工厂现场数据构建的,其中,工厂现场数据至少包括机器人作业所处的工厂的温度信息以及布局信息;确定用于控制目标机器人的操作信息,将操作信息发送至示教器集成系统,其中,示教器集成系统依据操作信息控制目标机器人。通过本发明,解决了相关技术中一个示教器只对应一个机器人示教器只能控制特定的机器人,无法通过一个示教器控制多个机器人,工程师对不同的机器人进行操作都需要更换不同的示教器的技术问题。