巡线智能垃圾分类捡拾车
来源: 发布时间:2023-12-02
浏览次数:11407
基本信息
第一作者姓名:高启航
性别:男
民族:汉族
第一作者学校:大连庄河市实验小学
第一作者人所在年级:五年级
辅导教师姓名:姜文波
作品摘要
*结构组成:
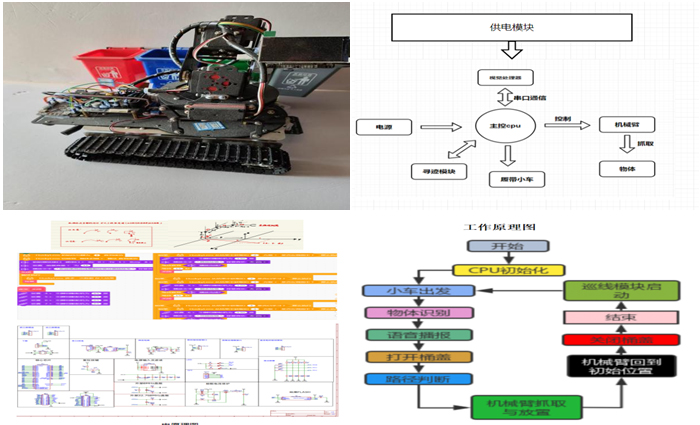
该作品主要由机械臂、垃圾桶、小车、stm32机械臂控制主板、小车控制主板、k210AI开发板、摄像头、电源模块、L298N驱动板、AI模块、语音模块、巡线模块、舵机等几部分组成。
*主要特征:
巡线智能垃圾分类捡拾车,是通过寻找预设黑线来行走,通过二哈识图来判断垃圾种类,openmv来定位控制机械臂抓取物品,放到小车上携带相对应的垃圾桶里。本作品有效的把智能小车和机械臂结合在一起,实现了边行走边判断和拾取垃圾并做到了智能分类。适用于各个室内和室外场所,有效的减少了人工劳动。
*主要用途:
本作品主要应用在学校.酒店.火车站.商场等一些人流量大.垃圾多的地方,主要是减少了工人的劳动强度,并时刻保持环境卫生。巡线智能垃圾分类捡拾车,是通过寻找预设黑线来行走,通过二哈识图来判断垃圾种类,openmv来定位控制机械臂抓取物品,放到小车上携带相对应的垃圾桶里。本作品有效的把智能小车和机械臂结合在一起,实现了边行走边判断和拾取垃圾并做到了智能分类。适用于各个室内和室外场所,有效的减少了人工劳动
*创新点:
1.K210开发板能定位物体X,Y坐标
2.机械臂能按照坐标抓取物体
3.AI自动识别物体的种类,同时语音模块报出物体名称。
4.Arduino Uno 能准确的控制舵机打开相应的垃圾桶盖。
5.坦克底盘能很好的应对各种路面结构,不会出现打滑等一些特殊情况。
作品说明
*问题提出:
*提出的问题和解决的问题:
从“中国制造”走向“中国智造”的转型升级对于我国制造业的发展已是迫在眉睫,这也成为推动国产机器人市场快速发展的驱动因素。机器人不再是简单代替人工作业,实际上是改变人类的生产方式,帮助各行业提高生产效率和产品质量,实现节能增效的现代化生产及管理方式。通过本次的选题,研究机器人相关的知识以及机器视觉方面的知识,一方面让我能够对机器人与机器视觉有更加深刻的了解,另一方面让我能够更加熟悉测控系统的设计。
研究问题的原因和意义:
目前发达国家对制造业,特别是以机器人为核心的智能装备产业相当重视,甚至将其视为经济发展的战略性驱动因素在国内方面,随着人口老龄化,中国人口红利逐渐消失,人力成本不断上升;同时,新一代年轻人往往不再愿意接受单调枯燥的流水线工作,更愿意从事相对自由、可自主支配的工作;特别是在有毒、有害恶劣工作环境下,特殊工种的工人可能面临长期的慢性伤害,从人道主义等方面考虑,这种工作也不适合由人工进行作业。
*解决方案:
解决问题的办法:
本作品的内容主要是基于机器视觉的通用零件搬运机器人样机的开发,需要研究的内容有:1.识别功能:能提取零件的特征,对零件进行识别。2.定位功能:通过相机标定以及相应的算法实现零件坐标的定位。3.搬运功能:通过机械臂的坐标变换、运动学的正逆运算求解 以及手眼坐标变换实现机械臂对零件进行抓取。4.轨迹控制:通过传感器实现寻轨。
嵌入式视觉系统具有易使用、易维护、易安装等特点,能够快速搭建起可靠而有效的机器视觉系统,从而极大的加快应用系统的开发速度。PC式视觉系统是依托于计算机的视觉系统,主要由图像采集系统、数据处理系统等组成,包含工业相机、工业镜头、图像处理软件以及其他配件产品。
发明研究的重点:
机械臂小车上的图传图传模块将图像信息发给PC机,PC机通过图传接收模块将图片信息接收并且通过PC机的软件处理运算得到被抓取物的特征信息以及具体的位置信息。然后通过数传模块将信息发给机械臂小车,机械臂接收到电脑发来的位置信息然后通过运算得到机械臂各所需转角,然后控制舵机做相应的抓取动作,将所抓取物放到指定位置,机械臂小车的寻迹可以用寻迹模块,如果时间充裕可用摄像头开发寻迹功能。本作品基于机器视觉的通用零件搬运机器人样机开发,机器视觉顾名思义用机器代替人眼来做测量和判断。机器视觉系统是通过机器视觉产品比如摄像头将被摄取目标转换成图像信号,传送给专用的图像处理系统,得到被摄目标的形态信息,根据像素分布和亮度、颜色等信息,转变成数字化信号;图像系统对这些信号进行各种运算来抽取目标的特征,进而根据判别的结果来控制现场的设备动作。嵌入式视觉系统具有易使用、易维护、易安装等特点,能够快速搭建起可靠而有效的机器视觉系统,从而极大的加快应用系统的开发速度。PC式视觉系统是依托于计算机的视觉系统,主要由图像采集系统、数据处理系统等组成,包含工业相机、工业镜头、图像处理软件以及其他配件产品。
发明研究的难点:
OPENMV通过调用相关函数及算法实现物体坐标定位,然后将坐标以及图形特征数据通过串口通信发给机械臂控制板,控制板通过串口接收OPENMV发来的数据,然后通过算法将物体基于摄像头的坐标转化为基于机械臂底座中心的坐标,得到了被抓取物体基于机械臂底座中心坐标后,通过机械臂的反解运算,算出每个关节的旋转角度,得到每个关节的角度后在通过舵机的安装位置确定舵机的旋转角度,利用控制板输出相应的PWM波,通过驱动舵机实现机械臂对物体的抓取。寻迹功能是通过寻迹模块与控制板的信号交流,实现小车的寻迹功能。
发明研究的难点:
OPENMV通过调用相关函数及算法实现物体坐标定位,然后将坐标以及图形特征数据通过串口通信发给机械臂控制板,控制板通过串口接收OPENMV发来的数据,然后通过算法将物体基于摄像头的坐标转化为基于机械臂底座中心的坐标,得到了被抓取物体基于机械臂底座中心坐标后,通过机械臂的反解运算,算出每个关节的旋转角度,得到每个关节的角度后在通过舵机的安装位置确定舵机的旋转角度,利用控制板输出相应的PWM波,通过驱动舵机实现机械臂对物体的抓取。寻迹功能是通过寻迹模块与控制板的信号交流,实现小车的寻迹功能。
本发明使用方法、附图说明性文字:
我们在地上铺设要巡线的黑线,蒋小车放置在黑线上,给小车通上电源,小车上的所有小灯亮起代表小车启动完成。小车上的巡线模块就会工作自动检测黑线,沿着黑线行驶,当机械臂上携带的摄像头检测到地面有垃圾时小车会停止运行,同时将垃圾的图像传输到k210AI智能识别开发板上,通过和开发板里存储的图像进行对比判断垃圾的类别,在经过k210AI智能识别开发板进行坐标运算得出物体所在的空间位置,蒋物体所在的坐标发送给stm32机械臂控制主板来驱动机械臂抓去物体放到相对应的垃圾桶里。
当物体抓取放置完成后机械臂回到初始位置,小车从新启动沿黑线继续前进,直到有新的垃圾被检测到小车会停止运行重复抓取动作,当小车上的巡线模块三个指示灯同时熄灭时小车会停止运行,再次启动时小车会向着相反的方向运行。
*使用或试用效果:
在工作过程中,智能垃圾捡拾车可以稳定且快速的完成目标任务。预先设想的各个功能都能很好的运行。
K210开发板上的摄像头能准确的捕捉到物体,并通过程序运算出物体所在的空间坐标,驱动机械臂抓取捕捉到的物体。
AI模块能通过预存的图片和摄像头捕捉到的物体进行对比并且能实时报出物体的名称,驱动相应的舵机。
巡线模块实现了预想的自动按线行驶,并能控制小车往复运动。
*优点:
本作品的优点有以下几点:
1.它的设计是为了更好的实现垃圾分类,也确时做到了这一点。
2.它能够减少工人的工作量,让环卫工人的工作更轻松。
3.它能够最大限度做到资源的回收在利用,从而能更好的保护环境,维护绿色地球。
*还需进一步研究的问题:
我认为本作品还可以在以下方面有进一步的提升:
1、巡线模块局限性太大,一些特殊地方无法铺设巡线路线。
2、舵机控制的机械臂抓取太过僵硬,抓取角度有一定的限制,机械爪抓取的面积过于小。
3、识别物体和捡拾物体时间过长,在程序算法上需要改进。
作品图片
查新说明
*查新网址与关键词:
万方数据资源系统
关键词(垃圾分类or垃圾or分类)and
(捡拾or车)结果:找到19条相关专利
关键词(捡拾or车)and 巡线and智能 结果:找到20条相关专利
关键词(垃圾分类or垃圾or分类)and 智能 结果:找到18条相关专利
*与本发明最相近的发明专利、研究文献的名称与摘要:
1.[题名]一种智能垃圾分类箱的设计
[作者]刘文斌 杨代云 李谦
[来源]农机使用与维修(ISSN:1002-2538)
[摘要]针对现有人工垃圾分类,设计了一种家用垃圾智能分类装置.其主要由帮助垃圾下滑的滚道结构、识别并分类垃圾的图像识别系统、控制垃圾桶旋转的间歇结构、实现垃圾桶倾斜侧出以便取出垃圾袋的脚踏板杠杆装置、抽屉储物结构组成.该装置节省了人工垃圾分类的过程,自动识别垃圾并投送到四个垃圾桶内,简化垃圾分类的过程,操作简单,同时将垃圾异味封闭,能有效提高家居环境清洁性,具有方便快捷、省人工、提高空气质量等优点。
2.[题名]基于智能识别技术的智能垃圾分类桶设计
[作者]陈陈 张旭 李逸轩 聂阳
[来源]科技与创新(ISSN:2095-6835)
[摘要]随着国家对垃圾分类的日益重视,人们环保意识得到了普遍提高,目前市场上对垃圾分类桶的需求巨大,但是市场上的产品不能指导居民按照国家垃圾分类标准进行垃圾分类,这样导致目前垃圾分类的效果不是非常乐观.为了提升垃圾分类的准确性,设计并实现采用图像识别技术与语音识别技术相结合的智能垃圾分类桶.基于智能识别的智能垃圾分类桶不仅能够很好地解决当下垃圾分类难的问题,还能进行垃圾分类知识普及,从而让人们深刻理解垃圾分类的重要性与意义.
3.[题名]选煤厂智能巡检机器人系统
[作者]乔奇
[来源]山东煤炭科技(ISSN:1005-2801)
[摘要]为了克服选煤厂采用人工巡检方法劳动强度大、工作效率低下、质量偏差大等问题,本文提供了一种选煤厂智能巡检机器人系统,用于替代原有的人工巡查系统.该系统可实现对选煤厂内设备的远程监管,降低选煤厂员工劳动强度,大大提升了选煤厂智能化与自动化水平,很大程度上提高了工作效率。