帮助学生书包爬楼梯的的减重机器人
来源: 发布时间:2023-12-02
浏览次数:12504
基本信息
第一作者姓名:胡东平
性别:男
民族:汉族
第一作者学校:广州市天河区五一小学
第一作者人所在年级:六年级
第二作者姓名:
性别:男
民族:
第二作者人所在学校:
第二作者人所在年级:
第三作者姓名:无
性别:男
民族:
第三作者人所在学校:
第三作者人所在年级:
辅导教师姓名:陈秋香
作品摘要
*结构组成:
1个CPU,2个55RPM微型减速直流马达(带动重物爬升、下降),1个马达调速PWM控制板,1个调速旋钮(滑动电阻原理控制速度快慢),1个外接电源的拨码开关(拨动开关即可完成通、断电),1个控制方向的按钮(上升、 停止、下降)和1个可充电的12V锂电池(节能环保)。为了保证电路稳定性,我在布线过程中增加了黑胶布捆绑和电烙铁焊接,并定制了一个亚克力外壳(12cm*6cm*3.5cm),小巧轻盈。
*主要特征:
设计一款小巧、便捷、实用的帮助重物爬楼梯的减重机器人,让书包“自己”爬上楼梯,同时满足大众爬楼时的减重需求,不需加装轨道即可实现机器人携带重物在楼梯扶手上的稳定、匀速运动。轻盈小巧,随带随用,机身尺寸仅为14cm*7cm*7cm,重量为0.72kg。这款减重神器成本低,使用方便,适用于所有楼梯扶手,轻松解决大众爬楼梯时的负重问题。
*主要用途:
帮助学生书包爬楼梯的减重机器人,属于爬楼梯减重技术领域,适合学生在学校背书包爬楼梯时使用,也能便捷满足大众在生活中携带重物爬楼梯(尤其是对老人或力气小的人),比如携带大米、油、蔬菜等爬楼梯。机器人具有小巧、便捷、实用的特点,能轻松解决爬楼梯时的负重问题,减少人们因负重爬楼梯而带来的劳累或身体伤害(膝盖损伤) ,为广大家庭带去实实在在的帮助。
*创新点:
不需加装轨道即可实现机器人携带重物在楼梯扶手上的稳定、匀速运动。
为了能将机器人快速稳定地安置在楼梯扶手的凹槽处,左侧马达连接处为铰链可折叠结构。
底部以一边侧钩悬挂重物,另一边滑轮作为导轨轮,实现卡槽夹力增大从而实现机身平衡。
调速PWM控制器实现马达正反转(升降)、可调速(滑动电阻原理)及过载保 护,保持机器人同人速度一致且不会重心下滑。
学生款设置载重量7.5kg,可用高扭矩马达调高载重量
作品说明
*问题提出:
*提出的问题和解决的问题:
学校教学楼的电梯不让学生乘坐,我背十斤的大书包爬五楼好累。如果我发明一个小巧轻便,让书包自己“爬楼梯”的机器人,那不就解决问题了吗? 这款减重神器还可以帮助生活中所有需要爬楼梯的人(尤其是老年人、力气小的人)拎提重物,如果像环保袋一样方便携带,轻松解决爬楼梯的负重问题,那是不是很棒呢!
现有的帮助残疾人坐轮椅上楼梯的辅助装置,或加装轨道辅助残障人士滑行上楼梯的装置,太贵,结构复杂,不适合日常使用
研究问题的原因和意义:
我喜欢用机器人的思维来解决生活中出现的问题。这次我想制造一个可以每天帮助我把很重的书包送上五楼的机器人。不单我有这样的困扰,生活中很多无电梯的楼房,提重物爬楼梯都很费力,尤其是对老年人、力气小的人来说。我希望我的机器人能轻松、通用地帮大家解决爬楼梯时的负重问题。
*解决方案:
解决问题的办法:
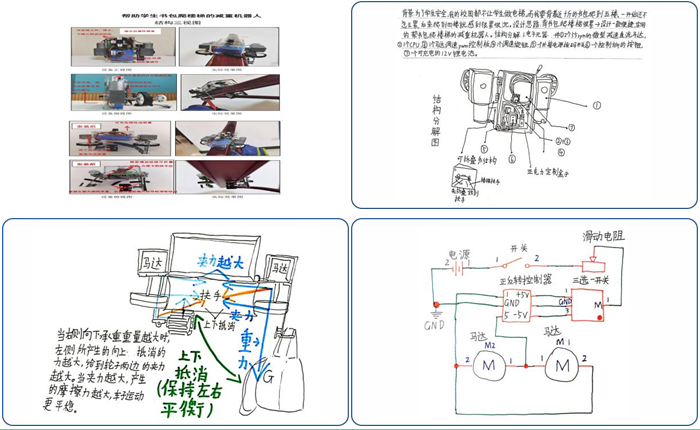
设计阶段:因为是辅助重物上楼梯的装置,我希望机器人满足小巧、轻盈的特点,不能额外增加太多的重量去实现运输。所以机身是由一个亚克力罩(12cm*6cm*3.5cm)+两个轮子+底下两边为侧钩承重与辅助爬升的导轨滑轮结构组成。尺寸设计匹配教学楼楼梯扶手,为了能快速稳定地安装在扶手凹槽处,左方马达连接处为铰链可折叠结构。底部以外侧钩为承载重物,内侧以导轨滑轮支撑扶手凹槽处,实现受力分解为两侧夹角力朝内向,上下力抵消,实现左右平衡,并且内向夹角力越大,两轮间摩擦力也越大,这样机器人在升降运动中更平稳。
调试阶段:把出现的问题记录好,多次实验调试。比如“电机扭矩不足以支撑10斤的书包,需要调试更换合适的电机”“如何调整合适距离和重心去支撑重物去爬升,并且不会往下掉”“如何增加爬升过程中的摩檫力,让机器人不打滑等”等问题。
发明研究的重点:
一、爬升装置:
如何解决机器人在楼梯扶手上的爬升、下降且不会因惯性掉下来?如何解决爬升装置顺利通过扶手的转弯位置?
首先我利用四个扭矩3kg的直流减速马达实现四轮驱动装置,轮距匹配凹槽部分。但四轮行走扶手凹槽处,在经过弯道时,因为轮距之间固定不能调整,不能顺利通过弯道。所以我利用PWM板+两个扭矩为12.5kg(爬升过程中涉及到坡度,所以扭矩需求要比水平行走时更大)的直流减速马达实现两轮驱动装置,轮距匹配扶手凹槽部分。扶手弯度没有影响轮距的前提下,两轮能实现顺利转弯。
二、可调节卡扣装置:
卡在楼梯的凹槽处,如何打开和放置爬升装置?
首先我利用底板卡扣固定装置,实现底板固定并可拆卸,能解决打开和放置爬升装置。但衍生出新的问题,底板插扣会影响爬升装置的爬升,增加一定的阻力,并且刮到扶手表面的漆,影响外观。于是我在底板处,两个马达对于底板不做完全固定结构,而是增加一个可折叠铰链做一个单向锁定结构。这样能解决打开和放置爬升装置的问题。操作简单,非常适合我们小学生或老人使用。
发明研究的难点:
1、如何解决爬升装置能承载10斤左右的书包或其他重物?
2、承载重物爬升过程中,如何避免楼梯栏杆的摩擦影响?
第一版,我继续增加马达的扭矩,为了调整承重重心,把承载重物的支撑点放置到两个马达的中心位置,可以解决问题1,但不能解决问题2。行走过程中容易刮到扶手支撑处,影响运动,并且无限制的增加马达扭矩,马达体积也会更大,整个装置更重更大,违背了想要制作一个轻盈、小巧、可随身携带的爬升装置的初心。
第二版,利用三角形的稳定性制作一个承重区,在双马达底下设计一个三角可拆卸卡扣结构。这样能解决1、2。三角可拆卸卡扣结构在货物重力下,有一个向下拉的力,力越大,所形成的夹角缝隙越小,轮子所受的摩檫力越大。三角形部分还可以调整重物重心,是比较稳定的爬升楼梯的装置。但衍生新的问题,扶手和栏杆的支撑杆固定,三角形结构运动中没办法通过支撑点。
第三版,重点考虑马达的扭矩(可承受力)+轮子的摩擦力,马达扭矩12.5kg*2足够,能解决问题1和2,底部以左侧钩承载重物,右侧以导轨滑轮支撑扶手凹槽处,实现受力分解为两侧夹角力朝内向,上下力抵消,实现左右平衡,并且内向夹角力越大,两轮间摩擦力也越大,运动更平稳。
发明研究的难点:
1、如何解决爬升装置能承载10斤左右的书包或其他重物?
2、承载重物爬升过程中,如何避免楼梯栏杆的摩擦影响?
第一版,我继续增加马达的扭矩,为了调整承重重心,把承载重物的支撑点放置到两个马达的中心位置,可以解决问题1,但不能解决问题2。行走过程中容易刮到扶手支撑处,影响运动,并且无限制的增加马达扭矩,马达体积也会更大,整个装置更重更大,违背了想要制作一个轻盈、小巧、可随身携带的爬升装置的初心。
第二版,利用三角形的稳定性制作一个承重区,在双马达底下设计一个三角可拆卸卡扣结构。这样能解决1、2。三角可拆卸卡扣结构在货物重力下,有一个向下拉的力,力越大,所形成的夹角缝隙越小,轮子所受的摩檫力越大。三角形部分还可以调整重物重心,是比较稳定的爬升楼梯的装置。但衍生新的问题,扶手和栏杆的支撑杆固定,三角形结构运动中没办法通过支撑点。
第三版,重点考虑马达的扭矩(可承受力)+轮子的摩擦力,马达扭矩12.5kg*2足够,能解决问题1和2,底部以左侧钩承载重物,右侧以导轨滑轮支撑扶手凹槽处,实现受力分解为两侧夹角力朝内向,上下力抵消,实现左右平衡,并且内向夹角力越大,两轮间摩擦力也越大,运动更平稳。
本发明使用方法、附图说明性文字:
为了能快速稳定地安置在扶手的凹槽处,左侧马达连接处为铰链可折叠结构;底部以一边侧钩悬挂重物,另一边滑轮作为导轨轮,实现卡槽夹力增大从而实现机身平衡;调速PWM控制器实现马达正反转(升降)、可调速(滑动电阻原理)及过载保护,保持与人速度一致且不会重心下滑;升降过程中,人机协作,手轻拉一下书包,即可避免栏杆的影响;学生款设置载重量7.5kg,可用高扭矩马达调高载重量;使用C语言对电子元器件指令进行编程,指令清晰,操作简单,功能完善。
这款减重神器具备生活的实用性和科学创新的智能性,帮助我们轻松解决爬楼梯时的负重问题。
*使用或试用效果:
按“电源”,电路板通电,按“上升”,机器人装置带着10斤左右的书包(或油米等生活用品)能稳定、可调速地爬升,运动过程中可通过“调速”旋钮实现运动速度的快慢调节。运动过程中,需要停止时可按“停止”,机 器人装置能稳定停住,不会有下滑趋势。按“下降”,机器人装置带着重物能稳定地沿着楼梯扶手向下行驶, 一切跟随着马达的带动行驶,不会有重心下滑的危险。运动过程中手轻拉一下书包,即可避免楼梯栏杆影响。
*优点:
市场上目前没有产品满足大众日常爬楼梯时的减重需求。本作品不需额外加装轨道,即可实现机器人携带重物在楼梯扶手上的稳定、匀速运动;小巧美观,像环保袋一样随带随用,适合帮助学生爬楼梯时运送书包,也适合大众爬楼时拎提重物:学生款设置载重量为7.5kg,可用高扭矩马达调高载重量,满足负重需求;可充电的12V锂电池与拨码开关相连,节能环保,拨动开关即可完成通断电;按钮式操作设于机身,不需遥控器(避免遗失)。
*还需进一步研究的问题:
可以对机器人的电子元器件、材料选择、功能实现、 尺寸等方面进一步优化,做得更精良。我希望需要爬楼梯的人们,就像随身携带环保袋一样,携带我的减重神器出门,轻松解决爬楼梯时的负重问题。它好像一个亲密的小伙伴,每天在帮助我们!
作品图片
查新说明
*查新网址与关键词:
查新使用的数据库:中国专利信息网 、专利之星检索系统(国家知识产权局中国专利信息中心)
辅助搜索引擎:百度、google
检索词:
1.爬楼梯减重
2.不需加装轨道
3.铰链可折叠结构
4.导轨轮
5.高扭矩马达
6.随带随用
检索式:
1. 爬楼梯减重and不需加装轨道
2.(爬楼梯减重or不需加装轨道)and铰链可折叠结构
3.(爬楼梯减重or不需加装轨道or铰链可折叠结构)and 导轨轮
4.(爬楼梯减重or不需加装轨道or导轨轮)and 高扭矩马达
5.(爬楼梯减重or不需加装轨道or铰链可折叠结构)and 随带随用
*与本发明最相近的发明专利、研究文献的名称与摘要:
按上述检索词,在以上数据库和搜索引擎等进行检索,均未查到与本作品类似的专利产品或文献等。本作品具有新颖性和独创性,在完成查新后,已申请专利。
目前市面上仅有帮助残疾人坐轮椅上楼梯的辅助装置,或通过在楼梯旁加装轨道辅助行动不便人士滑行上楼梯的装置。但都存在造价高昂,结构复杂,不能在社会上推广等问题,并且不方便安装和拆卸,也不适合我们日常减重需求。