半柔性可变形履带仿生爬虫机器人
来源: 发布时间:2021-11-01
浏览次数:2065
基本信息
第一作者姓名:盛嘉容
性别:男
民族:回族
第一作者学校:上海市民办平和学校
第一作者人所在年级:十年级
第二作者姓名:
性别:
民族:
第二作者人所在学校:
第二作者人所在年级:
辅导教师姓名:吕盈和
作品摘要
*结构组成:
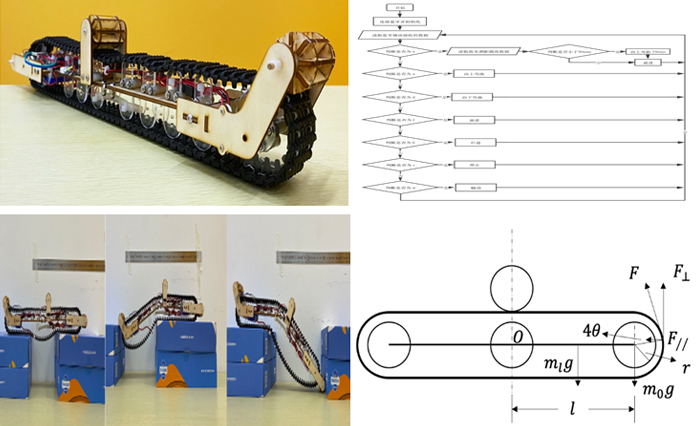
其机械设计由脊柱、合页、双驱动轮、与压带轮构成。通过合页连接脊柱;通过驱动轮相反速度达到主动弯曲;通过压带轮解决褶皱与脱链。电子设计由Arduino、蓝牙、激光测距与电机驱动模块构成。
*主要特征:
半柔性履带仿生爬虫机器人可适应复杂地形,跨越高度为180毫米的障碍物与长度为195毫米的沟渠,越障能力较刚性履带机器人有显著提升,具备117.6克荷载能力,对山区野外复杂地形有较强适应能力,具备完成辅助救灾与野外勘查能力。机器人通过合页结构与阻尼结构达到了可弯曲的柔性底盘结构;通过前后驱动轮的转速差达到弯曲状态,提高前轮轴心与地面垂直距离因而提高越障能力;可于基础救灾环境中进行搜救与勘查工作。
*主要用途:
通过柔性底盘与双驱结构使机器人跨越复杂地形,如沟渠、障碍物与垂直岔道。其意义在于丰富了传统机器人的运动模式,实现机器人的主动弯曲,使其跨越较高障碍物并运用于实际救灾场景与野外勘查中。
*创新点:
一、柔性底盘结构。底盘合页使本身刚性的单片脊柱变为双片可弯曲结构实现柔性状态。
二、双驱系统。利用前后驱动轮提供拉力,使机器人主动弯曲达到垂直状态。
三、压带轮。使履带与驱动轮充分接触防止脱链。
作品说明
*问题提出:
*提出的问题和解决的问题:
1. 如何达到履带机器人的柔性结构
2. 通过何种方式提高其越障能力
3. 如何防止转速不均所导致的脱链现象发生
4. 如何适应多种复杂地形
研究问题的原因和意义:
能够越障并适应复杂地形的机器人能够减轻人们的负担并且从很大程度上降低人们所面临的风险,如在救灾场景中的许多不确定因素。简单便携的救灾机器人也提高了搜救的效率。
*解决方案:
解决问题的办法:
半柔性履带仿生爬虫机器人能够适应复杂地形,跨越高度为180毫米的障碍物与长度为195毫米的沟渠,越障能力相较刚性履带机器人有显著提升,并具备117.6克的荷载能力,对于山区或野外的复杂地形有较强的适应能力,具备完成辅助救灾与野外勘查的能力,具体项目总结如下:一、该机器人通过合页结构与阻尼结构达到了可弯曲的柔性底盘结构;
二、该机器人通过前后驱动轮的转速差达到了弯曲状态,提高了前轮轴心与地面的垂直距离,因而提高其越障能力;
三、该机器人可运用在基础救灾环境与野外环境中进行搜救与勘查工作。
发明研究的重点:
1. 爬虫机器人的越障能力
2. 爬虫机器人的弯曲模式
3. 爬虫机器人的驱动模式
发明研究的难点:
1. 通过机器人的结构设计以达到弯曲的运动模式。
2. 通过在机器人不同位置安装脱链/压紧轮结构以防止脱链现象发生。
发明研究的难点:
1. 通过机器人的结构设计以达到弯曲的运动模式。
2. 通过在机器人不同位置安装脱链/压紧轮结构以防止脱链现象发生。
本发明使用方法、附图说明性文字:
1. 启动机器人开关,准备蓝牙手机
2. 通过蓝牙串口APP连接蓝牙模块进行远程操控,可选择手动与自动模式
3. 自动模式中,机器人将自行判断障碍物并执行越障功能
4. 手动模式中,可发送相关指令,如向上抬起、向下拱起、前进、后退、左转、右转等指令,使机器人在复杂地形中仍具备通过能力。
*使用或试用效果:
该机器人地形适应能力较好,具备极佳越障能力。可跨越高度为身长一半的障碍物且具备117.6克荷载能力。综合障碍物通过、沟渠通过与垂直岔道实验,该机器人使用效果良好,且可以执行跨越较复杂地形的任务。
*优点:
该机器人具备良好的越障能力及适应复杂地形的能力,且能、方便运输。不仅借助电机所提供的拉力,更借助自身重心移动顺利完成越障动作。其出色的荷载能力也使其能够安装不同功能的传感器,并在救援中携带必须的物资。
*还需进一步研究的问题:
一、在保持机器人稳定结构的前提下增加关节节数,使机器人柔性度增加;二、加强机器人的实际运用能力,运用远程通讯模块更有效地控制机器人;三、在电路部分增加防水的结构,使机器人安全适应救灾或野外环境;四、安装摄像模块与定位模块,使拍摄画面实时传输给电脑,以便人们判断是否有遇难者并及时通过精准定位展开搜救。
作品图片
查新说明
*查新网址与关键词:
佰腾专利检索网址:http://so.baiten.cn/
关键词1:救灾 and 机器人 and 柔性,结果:找到8条相关专利
关键词2:救灾 and 机器人 and 变形,结果:找到5条相关专利
关键词3:机器人 and 柔性 and 变形 and 双驱,结果:找到2条相关专利
关键词4:救灾 and 仿生 and 机器人 and
*与本发明最相近的发明专利、研究文献的名称与摘要:
CN201611091611.7 具有地面移动和飞行运动方式的轮腿复合式两栖机器人
摘要: 本发明公开了一种具有地面移动和飞行运动方式的轮腿复合式两栖机器人,包括:主体支架、四个轮系装置和六个三关节仿生肢装置和一个六翼飞行装置;所述六个三关节仿生肢装置分布在主体支架两侧,所述四个轮系装置分别安装在六个三关节仿生肢装置中的两个前三关节仿生肢装置和两个后三关节仿生肢装置上;所述六翼飞行装置固定设置在主体支架的顶端。本发明具有爬行和车轮行进两种地面移动方式,以及飞行运动方式;可以适应不同的工作环境,三种运动方式可以根据路况和使用者的使用需求进行任意切换,大大增加了机器人的机动性和工作效率。
*自我查新结论:
新颖