三栖球形防撞无人机
来源: 发布时间:2021-11-01
浏览次数:7219
基本信息
第一作者姓名:李泽钧
性别:男
民族:汉族
第一作者学校:北京市第二中学分校
第一作者人所在年级:八年级
第二作者姓名:
性别:
民族:
第二作者人所在学校:
第二作者人所在年级:
辅导教师姓名:刘鑫
作品摘要
*结构组成:
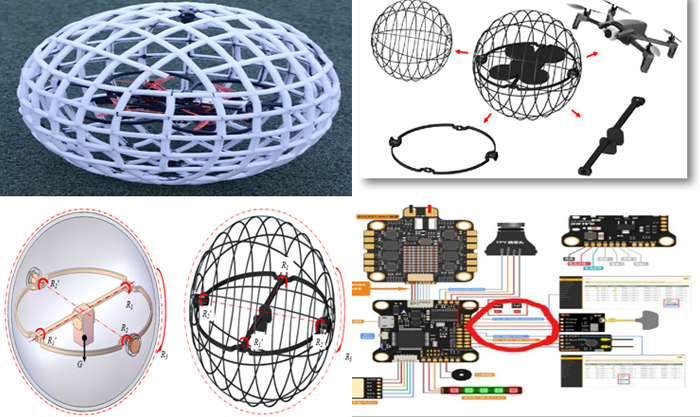
三栖球形防撞无人机主要由无人机本体、球形结构、转动环组成。其中:无人机本体包括碳纤维外壳、摄像头、电机、桨叶。球形结构包括转动环、球体、转动轴、轴承、漂浮装置。
*主要特征:
三栖球形防撞无人机,满足恶劣天气、狭小空间、复杂地形飞行,可实现水中、陆地、空中三种环境实时切换前进,整机球形防撞设计,即使不小心碰到障碍物也会立刻反弹并自动进行机械调平,时刻保持平稳行驶,避免炸机。陆地行驶时球体滚动,向各个方向运动;水中行驶时,球形依靠浮力装置浮在水上,球体滚动向各方位行驶;空中飞行依靠无人机本体直接飞行,最终实现三栖功能。
*主要用途:
用于恶劣天气、狭小空间、复杂地形探测、侦察及数据采集等复杂任务,实现水、陆、空三种模式实时自由切换,遇障碍自动机械调平,球形整体防撞设计,应用于复杂环境及地形,如:陆地、水面及空中探测及侦测数据采集。
*创新点:
球形结构设计,依据不倒翁原理,遇障自动机械调平,避免炸机。陆地球体滚动行驶,水中浮力装置行驶,空中无人机本体飞行,实现三栖功能。水、陆、空三种模式实时切换,无需拆装。结构、性能可靠,制造成本低。
作品说明
*问题提出:
*提出的问题和解决的问题:
问题:目前的三栖无人机在切换水、陆、空形态时,普遍需要手动组装或者通过遥控控制变形进行切换,切换过程繁琐,控制程序复杂。且只能在天气情况良好时飞行,遇突然大风或其他恶劣天气时桨叶裸露容易发生碰撞坠机。
研究问题的原因和意义:
我希望制作一款在空中、陆地、水中可实时切换无需手动辅助变形,也无需遥控控制变形的三栖球形防撞无人机,以解决无人机在极端天气、极端地貌环境正常行驶问题,
提高三栖功能的适应性、便捷性与防炸机性能。
*解决方案:
解决问题的办法:
整机外壳参考鼠笼结构设计,主材质为碳纤维。依据不倒翁原理,合理配重,结合球形表面、连接轴、转动环控制3个自由度,保证无人机在球形结构内部自动进行机械调平。
共设计了四代,采用逐代验证升级的办法。第一代验证原理可行性,球形结构设计实现地面滚动,发现负载重,强度不高,且球面凹陷不平整;第二代寻找重量轻、浮力大的漂浮材料,验证漂浮性能;第三代实现水、陆、空三栖功能,但强度有待提高;第四代结构优化解决强度问题实现水、陆、空三栖防撞功能。
发明研究的重点:
无人机本体与球形结构连接后,转动自由度问题解决。
发明研究的难点:
解决球形结构与无人机本体的连接方式,保证无人机在球体内可以自由转动,实时保持平衡。
发明研究的难点:
解决球形结构与无人机本体的连接方式,保证无人机在球体内可以自由转动,实时保持平衡。
本发明使用方法、附图说明性文字:
三栖功能整体考虑到不能增加不必要重量,所以靠球体进行水中和陆地上的运动,并且连接在球体上有3个自由度,陆地行驶时球体滚动,向各个方向运动;水中行驶时,球形依靠浮力装置浮在水上,球体滚动向各方位行驶;空中飞行时电机加速转动即可飞行,实现效果流畅,操作简单。球形结构全方位保护无人机,机械结构防撞,可有效避免炸机,即使碰到障碍物也会立刻反弹并做出调整,时刻保持平稳行驶,在恶劣天气、极端地貌也可正常行驶。
*使用或试用效果:
已实现功能:水中、陆地、空中的实时切换;自由落体试验30米坠落,无人机本体完好无损;被动行走机制,高效率,长续航;机械智能自调平,无人机指向性良好;陆地奔跑试验速度25.1km/h。
*优点:
采用弹性球形防撞结构,全方位包裹避免炸机;
水中、陆地、空中的实时切换,无需拆装;
不倒翁原理,机械智能自调平;
被动行走机制,高效率;
满足恶劣天气、狭小空间飞行;
结构可靠,成本低,利于批量生产。
*还需进一步研究的问题:
一是进一步优化作品的骨架结构及质量,降低气流给无人机带来的影响。二是逐步能够扩大作品的应用领域。三是进一步优化整体结构,使之更加轻量化,增加续航的时间。四是根据实际应用的不同需求,适时增加选配的功能。
作品图片
查新说明
*查新网址与关键词:
佰腾专利检索网址:http://so.baiten.cn/
关键词:球形无人机and四轴飞行器 and防撞and三栖and实时切换
结 果:找到0条相关专利
*与本发明最相近的发明专利、研究文献的名称与摘要:
CN201810379757.4一种基于重心控制的海陆空三栖球形机器人
摘要: 一种基于重心控制的海陆空三栖球形机器人,本发明的目的在于实现海陆空三栖,综合陆地、水中、空中无人设备的功能,为实现上述设计目的,本发明由球形机壳、涵道风扇、内部环形齿轮、叉形旋转架、滚转驱动电机、滚转齿轮、控制配电组件、平移驱动电机、条形齿轮、平移驱动齿轮组成。当需要在地面运动时,实现球形机壳在一维运动的同时因为重心的左右偏移实现转向,即实现球形机壳的二维方向上的运动控制。当需要在水中运动时,此时的球形机器人控制类似一个双螺旋桨的船,通过两个涵道风扇的配合实现球形机器人的前进、后退、转向功能。当需要飞行时,此时的球形机器人起飞与四轴飞行器类似,通过控制四台涵道风扇的运动实现球形机器人的飞行。
*自我查新结论:
新颖