高效智能垃圾清扫车
来源: 发布时间:2017-10-24
浏览次数:2460
第一发明人姓名:李苏文 徐振森
性别:男
民族:汉族
发明人所在学校:泰州机电高等职业技术学校
发明人年级:高二
辅导教师姓名:姚政
作品摘要:
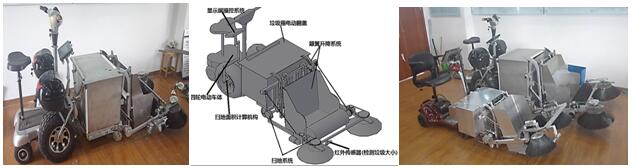
*结构组成:本项目以大功率四轮电动车(48V30AH)为载体,包含一个机构三大系统即扫地面积计算机构、显示屏触摸操控系统、簸箕升降系统、扫地系统。
*主要特征:本项目以大功率四轮电动车(48v30AH0为载体、PLC技术程序控制、用户名、密码登陆的人机一一对应、反射式红外激光检测的"垃圾大小通吃"、垃圾自动爬升翻倒、扫地面积实时显示及扫地结束后数据物联网传输等设计的智能化目标。所谓人机一一对应指的是环卫工人用自己的用户名及密码进行登录操作,实现操作人与环卫管理中心数据一一对应;所谓"垃圾大小通吃"是指利用反射式激光传感器检测垃圾的大小,通过程序控制实现滚
*主要用途:本项目是一种高效智能垃圾清扫车,项目以大功率四轮电动车(48v30AH0为载体,利用PLC技术程序控制,整个扫地过程中实现了用户名登陆的人机一一对应、红外激光检测的"垃圾大小通吃"、垃圾自动爬升翻倒、扫地面积实时显示及扫地结束后数据物联网传输等智能化目标,可广泛利用在非机动车道、人行道、校园、企事业单位等公共场所的日常清扫工作。
*创新点:本项目是一款人机一一对应且对路面平整度无特殊要求,集路面清扫(智能区分大小不同的垃圾)、垃圾回收、扫地面积实时显示及数据物联网传输和运输为一体的新型高效智能低噪声无污染清扫车。
作品说明:
*问题提出:1.体积较大的垃圾没有办法清理该怎么办? 2.如何实现簸箕的爬升翻倒?
*解决方案:1.垃圾车前端滚刷上安装一个红外激光传感器,当感应到体积较大的垃圾时,滚刷盘刷抬升,如果不够就继续抬升,直到红外激光传感器恢复 2.簸箕升降系统动力由电动推杆(200kg)提供,它由电动推杆、链轮、链条、簸箕爬升导轨及内外框架等组成。翻倒垃圾开关电动推杆带动链轮及内框架向上抬升,外框架带着簸箕沿着簸箕爬升导轨向上运动,当翻倒旋转轴运动到簸箕爬升导轨顶部时受到阻力无法再向前,此时电动推杆的推力使得内框架的旋转轴发生旋转,外框架带动簸箕上翘抬起实现翻倒的目的。(其原理参阅说明书的13页)
*使用或试用效果:在地面散落一些垃圾,扫地车走到垃圾前方,通过红外激光传感器感应垃圾后,前端滚刷和盘刷抬起,盘刷滚刷放下,将垃圾扫入簸箕中。
*优点:本清扫车主要技术贡献是实现了人机一一对应,实时显示操作人员的扫地面积 ,并将具体的扫地面积以物联网的方式传输给环卫管理中心,在清扫车前端盘刷旁安 装了可调高度的一个红外激光传感器,实现了垃圾大小通吃的功能,同时当簸箕内的 垃圾盛满时,一键操作实现自动爬升翻倒的目的
*还需进一步研究的问题:本项目正处于模型机阶段,目前设想与环保部门联系沟通并 进一步的研究改进,同时与厂家密切合作将项目加工成产品并且进行大规模的推广。
查新说明:
*自我查新结论:新颖经对检索出的相关文献进行分析、对比,结论如下:一种高效智能垃圾清扫车,项目以大功率四轮电动车(48v30AH0为载体,利用PLC技术程序控制,整个扫地过程中实现了用户名登陆的人机一一对应、红外激光检测的垃圾大小通吃、垃圾自动爬升翻倒、扫地面积实时显示及扫地结束后数据物联网传输等智能化目标,可广泛利用在非机动车道、人行道、校园、企事业单位等公共场所的日常清扫工作。 检索中未见与本课题相同的报道。