切换导航
首页
活动概况
新闻中心
通知公告
网上展览馆
精彩活动
交流反馈
参赛入口
首页
>
网上展览馆
>
发明
>
第十届
基于Leap Motion的手势控制机器人
来源:
发布时间:2014-09-24
浏览次数:2114
作品名称:
基于Leap Motion的手势控制机器人
作品照片1
作品照片2
作品照片3
作品摘要:
MotionRobot 项目使用了一种由两个摄像头、三个红外发射器所组成的传感器Leap Motion。通过图像识别技术和算法,实现了用手势就可指挥控制机器人工作的全新的人机交互方式。 该机器人通过对Leap Motion手势控制的研究和设计为人们提供了更加简单方便易于掌握的操作方式和控制手段。 这个机器人设计的初衷是为了使人们更加方便的完成一些远程任务或危险环境下的工作,还可为行动不便的残疾人服务,使他们只需坐椅子上挥动手指就能控制机器人的行走、抓取物品等来代替人完成很多任务。
作品设计思路:
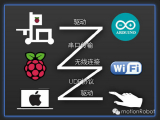
偶然的一次机会我们发现了国外新开发出来的手势识别设备Leap Motion,它的诞生给人们带来了全新的人机交互方式,我们便决定对其进行再开发,使其完成更多的其他目的。由于LeapMotion面世不久,产品并不完善,所以在开始阶段遇到了很多问题,比如坐标数据取样率极低、长时间运行数据量过大导致程序卡死等问题,但随后通过我们的慢慢摸索,逐渐理解了它的工作原理,并成功得到完整的数据。接着我们开始了整个任务当中最难,也是最具突破性的部分—编写电脑端程序,这部分程序需要将从LeapMotion获取的数据转换成机器人执行动作的指令,在这部分当中,我们自己根据数学模型设计的算法,改善软件稳定性和可维护性并更大的发挥系统硬件性能。在当时由于Leap Motion过新,现有资料当中并没有可以参考的内容,完全靠自己设计和编写。机器人接收数据后机器人便能执行行走及完成指定的指令。硬件方面,我们使用wifi技术进行电脑与机器人之间的通讯,树莓派作为对指令进行解码及转发,Arduino实施对机器人的机构进行控制,从而完成整个从指令接收到执行的过程
宋庆龄少年儿童发明奖组委会版权所有