切换导航
首页
活动概况
新闻中心
通知公告
网上展览馆
精彩活动
交流反馈
参赛入口
首页
>
网上展览馆
>
发明
>
第九届
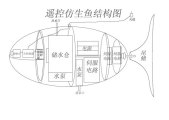
遥控仿生魚
来源:
发布时间:2013-11-08
浏览次数:2470
作品名称:
遥控仿生魚
作品照片1
作品照片2
作品照片3
作品摘要:
(一)创新问题提出:基于仿生鱼能快速完成人们难以完成的如搜巡物体,探查狭窄水道,寻找受污染水域等任务和在军事上有很强的隐敞性特点,因此人们对"仿生程度提高"及"利用仿生鱼"的探究日益升温。从历届青少年发明创新大赛中,我们发现同学们研制的仿生鱼只能作匀速运动,只能在水面游动。为解决以上两个问题,我们开始了研制。 (二)解决创新问题:⒈使仿生鱼可变速游动更加接近自然鱼。通过第一次的设计制作后,仿生鱼能在水中平稳的游动。怎样才能使仿生鱼象自然鱼那样可停留,可匀速游动和加速运动?我们对仿生鱼的控制部分进行了分析、研究、试制,经多次试验,采用了在原电路的基础上,提高推动尾鳍运动直流电机的电流电压和用电子调速器控制来实现了构想。 ⒉用"储水舱"法等,让仿生鱼下潜上浮。自然鱼泡的工作给了启示,我们在仿生魚体内安装一个储水舱,在储水舱外安装了1个24V的微型自吸水泵并连接到控制器上。利用储水舱内水的多少,调节仿生魚身体重力和浮力之间的关系;通过试验,还用适量的铅块填充到鱼肚里,当储水舱内水大半时仿生魚就下沉。这样,上浮下潜问题解决了。
作品设计思路:
首先对自然魚类的体形结构、游动原理进行学习与研究,然后对仿生鱼结构、传感系统、尤其重点对游动、潜浮结构、游动控制等进行设计制作。 1基本结构设计:仿生鱼体为①感知部分:对应着实际应用的障碍传感器及电路;②动作部分:由直流电机等构成,带动鱼体前进、自由转弯和下潜上浮;③行为部分:用来控制直流电机的实际电路;④主控制芯片部分:鱼的大脑,由无线电操纵控制着整个鱼的动作。2驱动系统设计:由相关的控制部分电路和与之相连的直流电动机组成,电动机工作时轴转动带动机构动作。3尾部结构设计:魚唯一的动力来自尾鳍。这尾鳍,由后部伸出的一只机械臂带动。机械臂接到直流电机上,使鱼运动。4游动、浮潜结构设计:(上框"(二)"巳说明)5运动控制电路设计:将接收天线装在水面塑料盒中用软导线与鱼内部控制器相连,遥控器通过天线对鱼发出指令信号,鱼接收信号后向各个子系统发出控制信号,子系统按规定的指令执行动作。6传感系统设计:魚的视觉感知部分是把摄像头、LED灯、视频发射电路装在鱼头部,用软导线与塑料盒中天线相连,鱼能将水下影像视频信号传回地面。
宋庆龄少年儿童发明奖组委会版权所有